概述
通过本文档的概述,能够让初次使用测试者快速了解测试I2C通信协议的设置,通过 PC 连接完成 IIC 通信协议的产品测试。以实现通过扩展I2C接口的形式连接北醒TF-Luna实现激光测距。
产品介绍
1、介绍
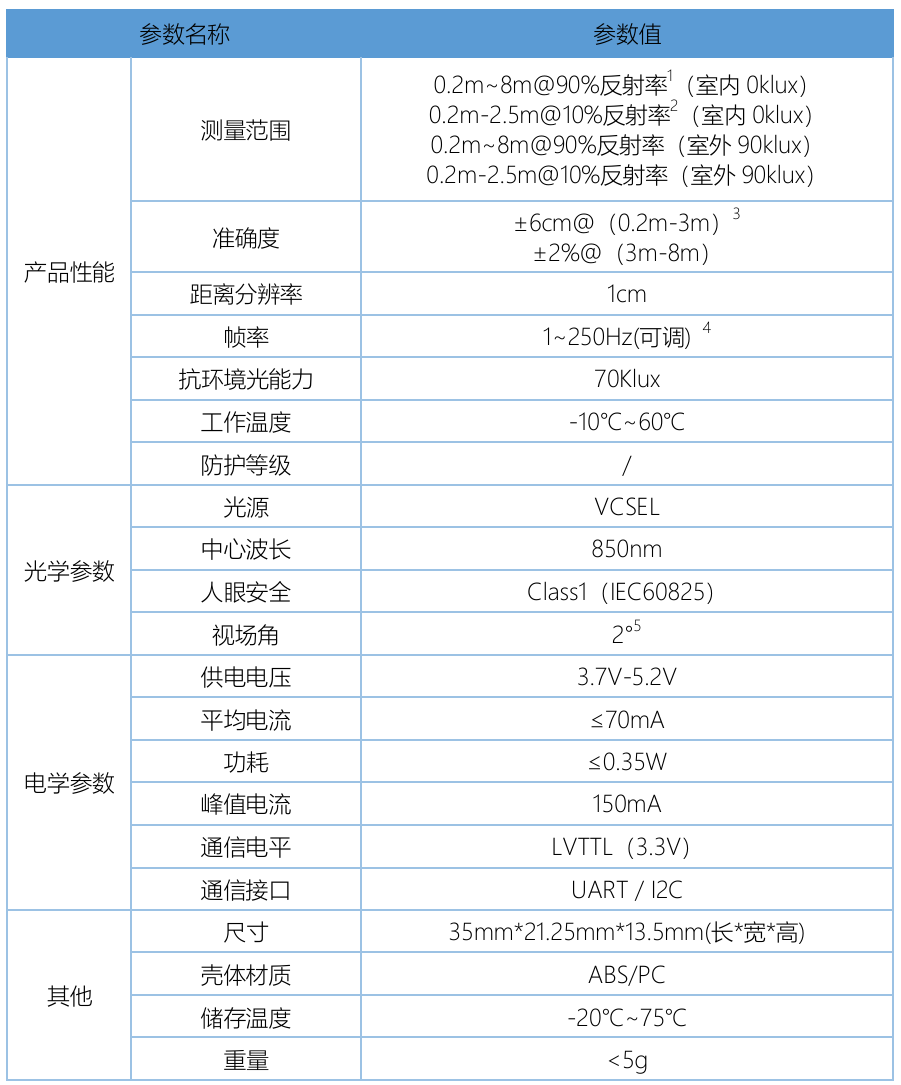
TF-Luna 是一款基于ToF原理的单点测距雷达,采用850nm红外光源,配合独特的光 学,电学设计,可以实现稳定、精准、高灵敏的距离测量。 产品内置多种应用环境及目标的适配算法,并开放了多种可调节配置和参数。可以保证 在复杂环境中具有优良的测距性能,满足客户复杂的应用场景需求。
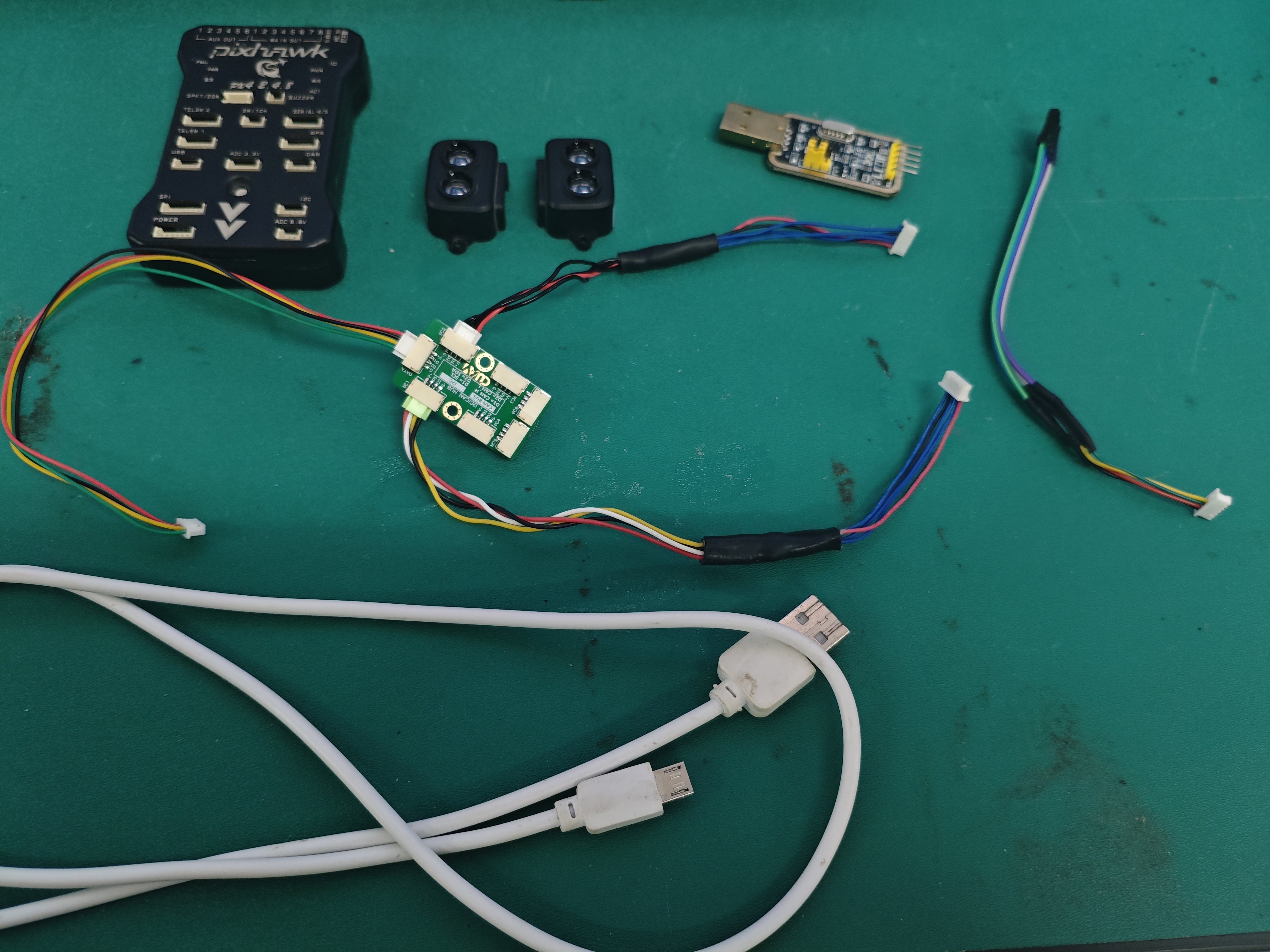
3、使用设备
一根Micro-USB数据线
一块Pixhawk 2.4.8飞控
一个I2C扩展板
一根4P带卡扣转4P不带卡扣线(用于飞控连接扩展板)
两根4P带卡扣转6P不带卡扣(用于扩展板连接激光雷达)
一个TTL转换器(用于刷雷达参数)
一根4P杜邦线转6P不带卡扣(用于TTL连接雷达)
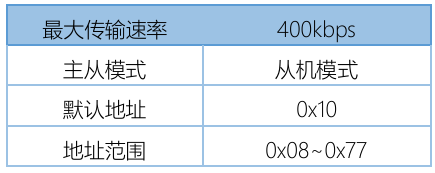
2、产品参数
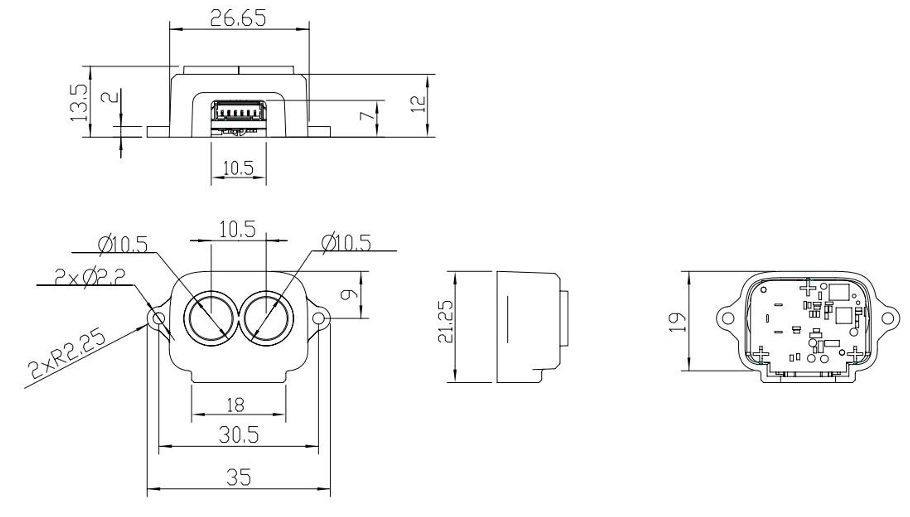
4、产品尺寸
5、通信接口接口
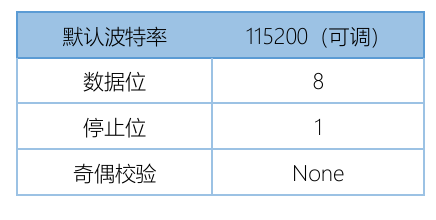
UART口
I2C口
6、引脚定义


雷达数据烧录
雷达驱动程序:https://wwmg.lanzouj.com/iXKkd2944fbg
雷达烧录软件:https://wwmg.lanzouj.com/iR90O2944fch
由于我们采用I2C扩展板的方式,在Pixhawk 2.4.8上使用两个TF-Luna雷达,所以需要对雷达进行设置。
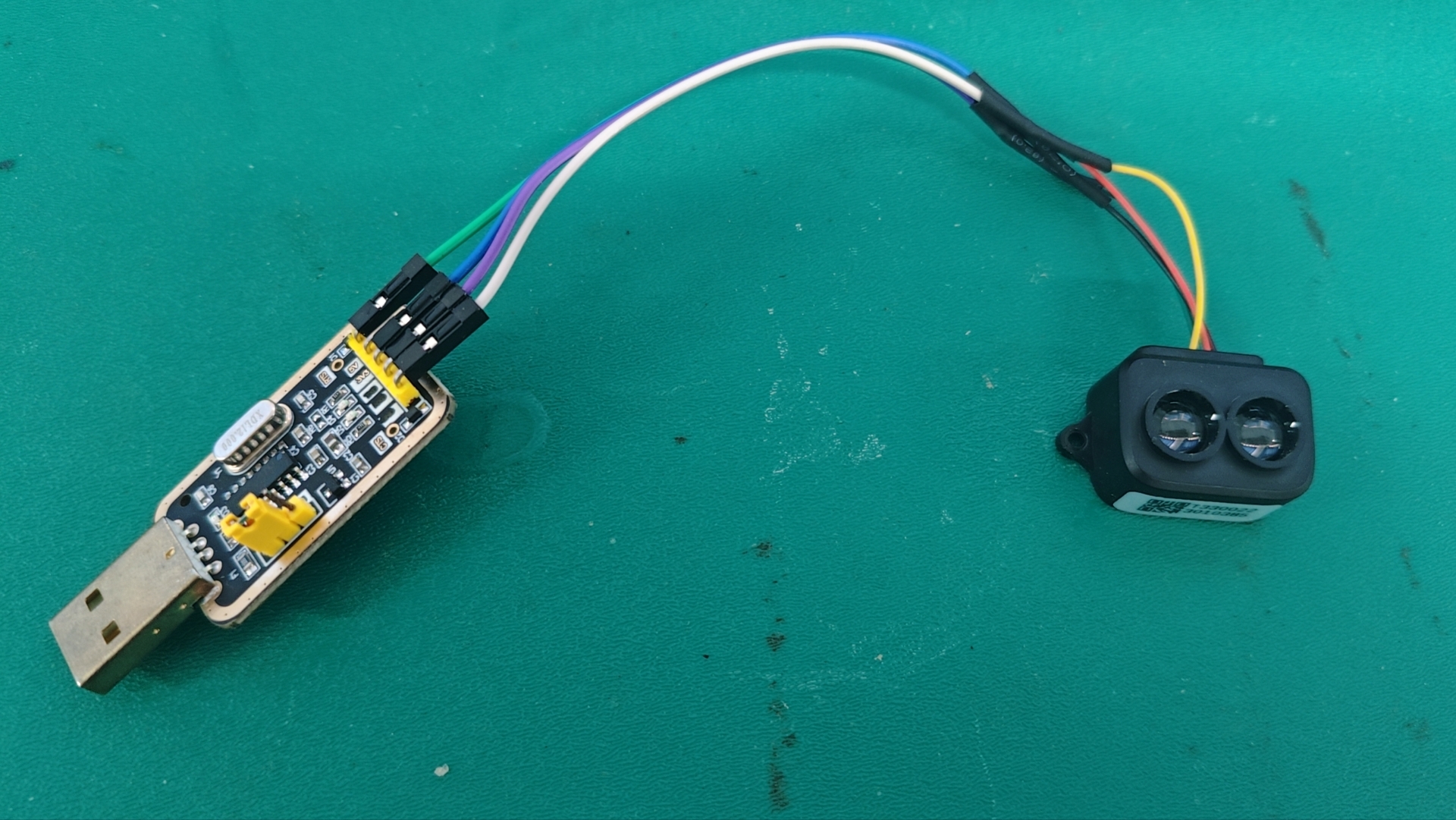
1、将4P带卡扣转6P不带卡扣以5V->5V TX->RX RX->TX GND->GND 的方式分别连接至TTL转换器以及雷达,如图所示。
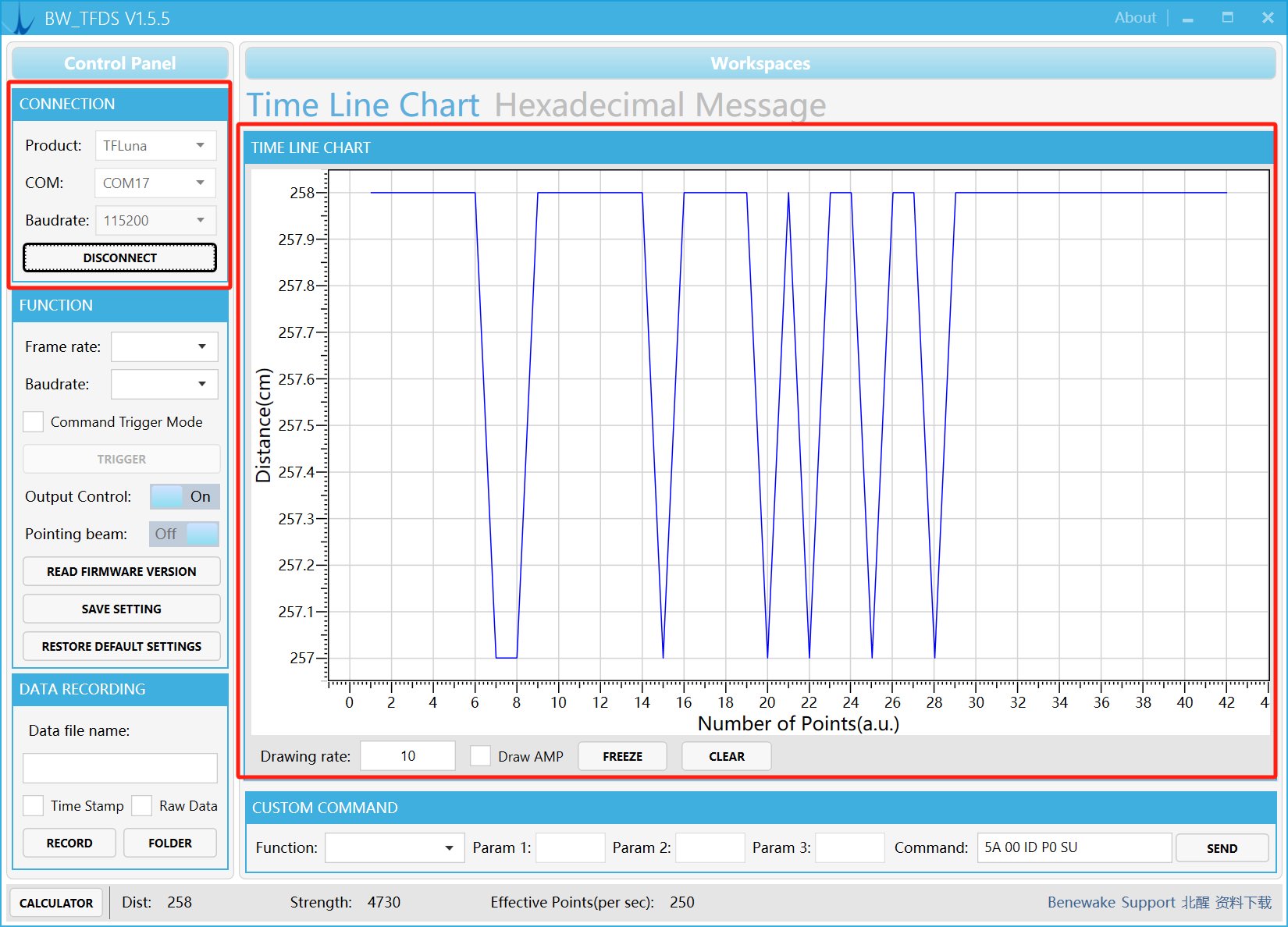
2、连接至电脑,并打开WINCC_TF软件,依次设置Product为TFLuna,COM为COM17(根据自己的COM进行设置),Baudrate为115200,完成后点击CONNECT后出现数据。如图所示。
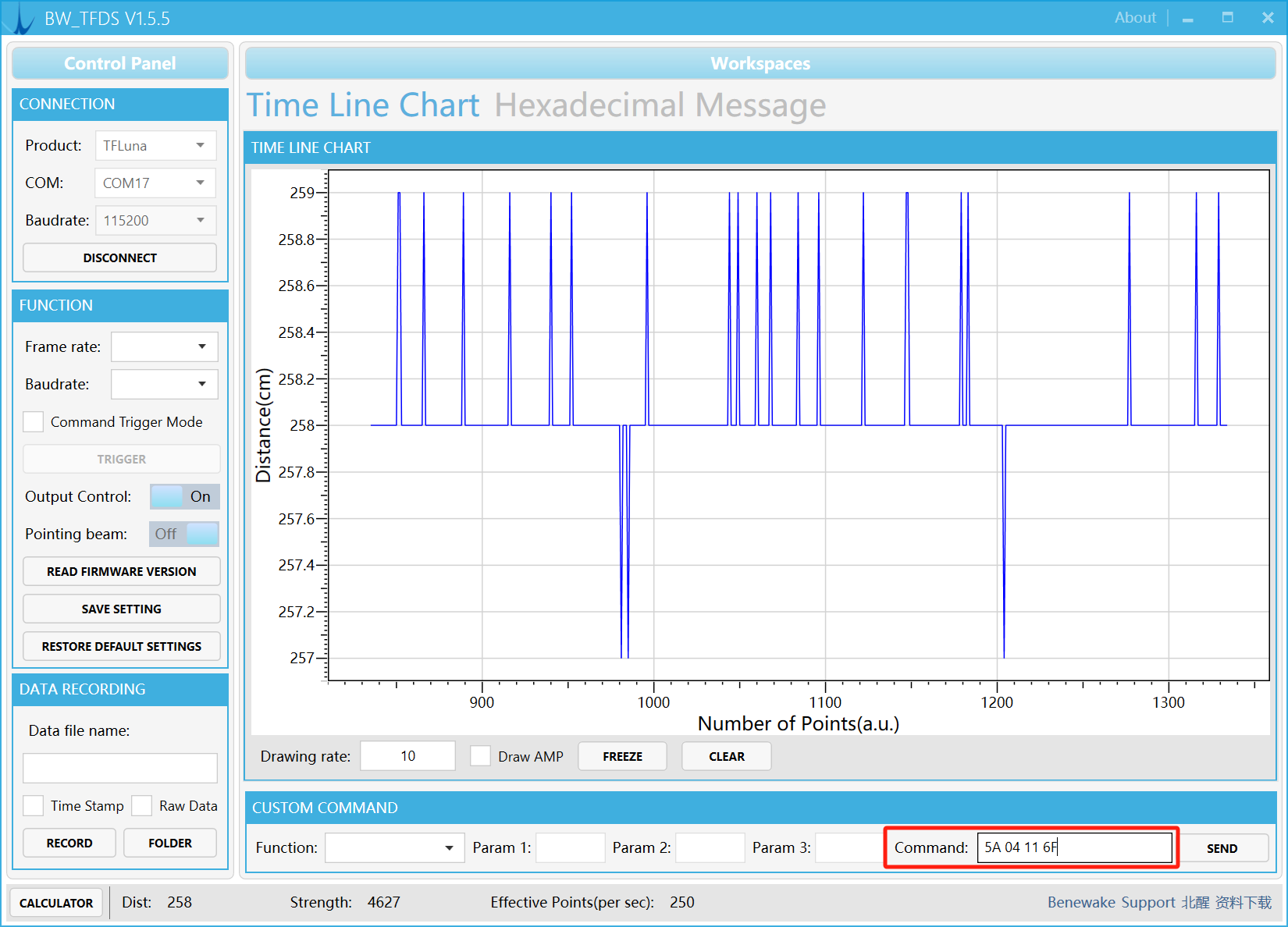
3、出现数据后我们开始设置雷达,第一个雷达我们设置为前向雷达,在Command中写入5A 05 0B 10 7A设置雷达为前,点击SEND,然后继续写入5A 04 11 6F保存设置,点击SEND(点击SEND后不会有提示,觉得没有写上可以多点几次)。
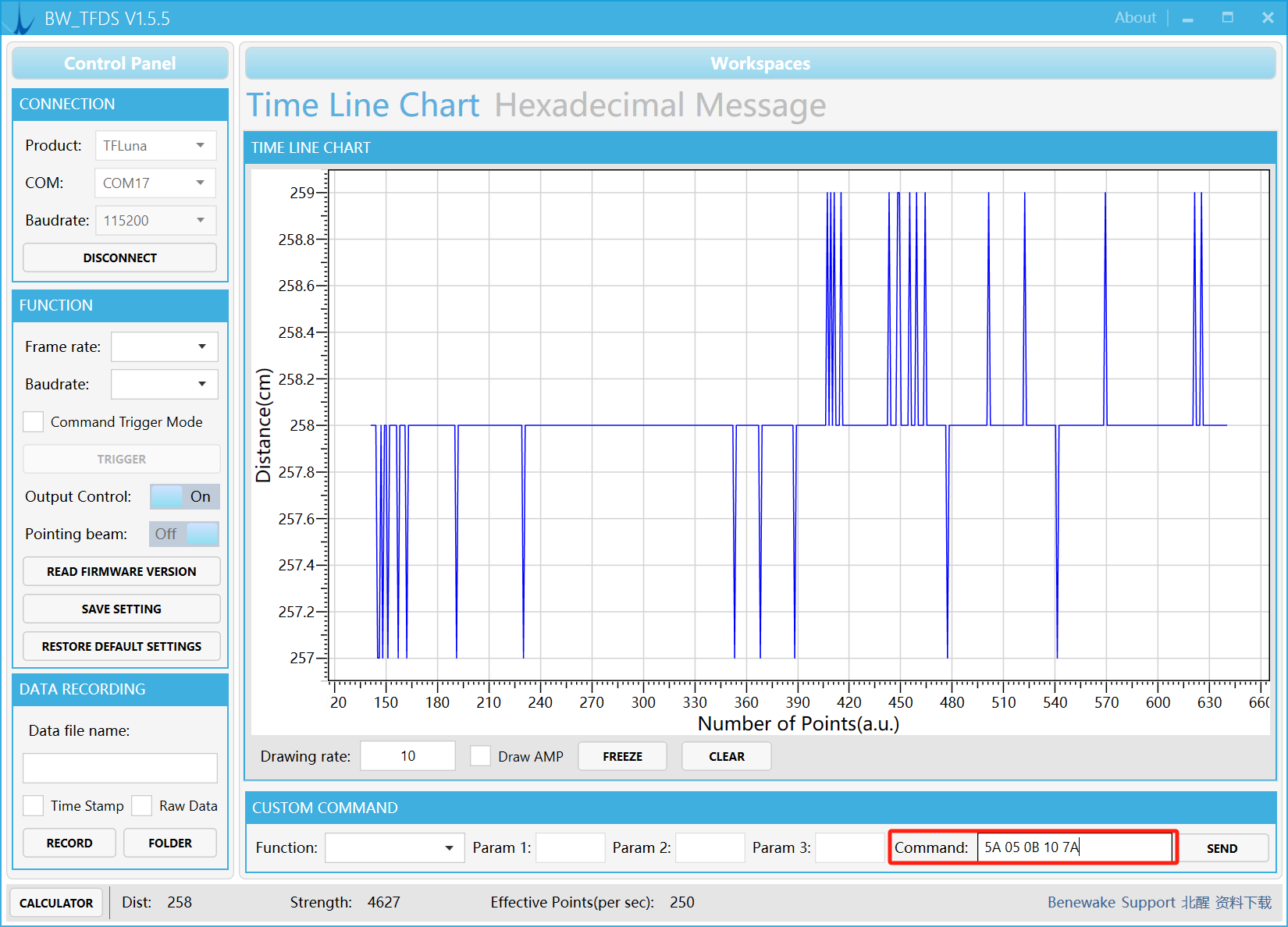
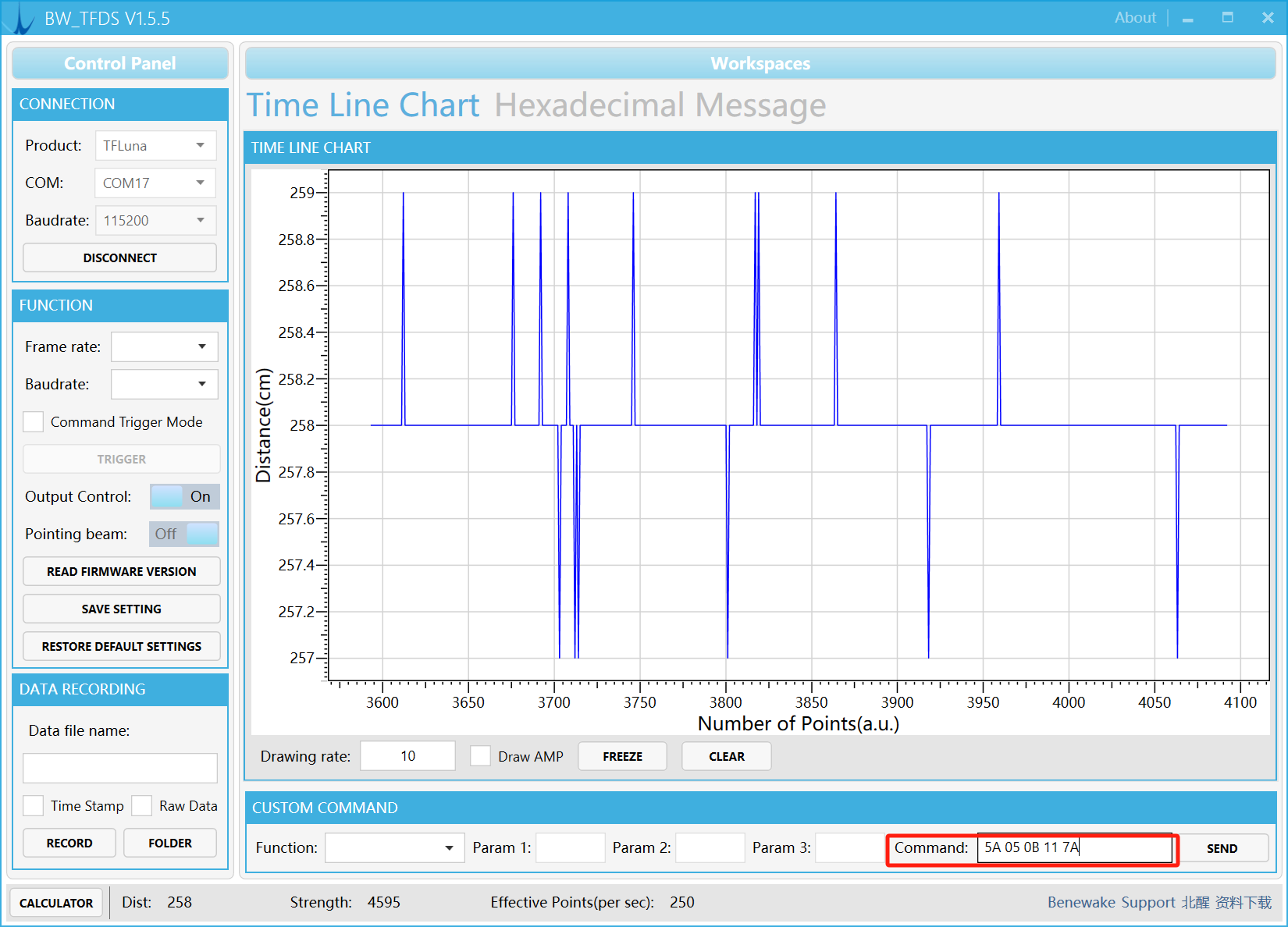
4、第一个雷达我们设置为前向雷达,在Command中写入5A 05 0B 11 7A设置雷达为左,点击SEND,然后继续写入5A 04 11 6F保存设置,点击SEND。
飞控连接与参数设置
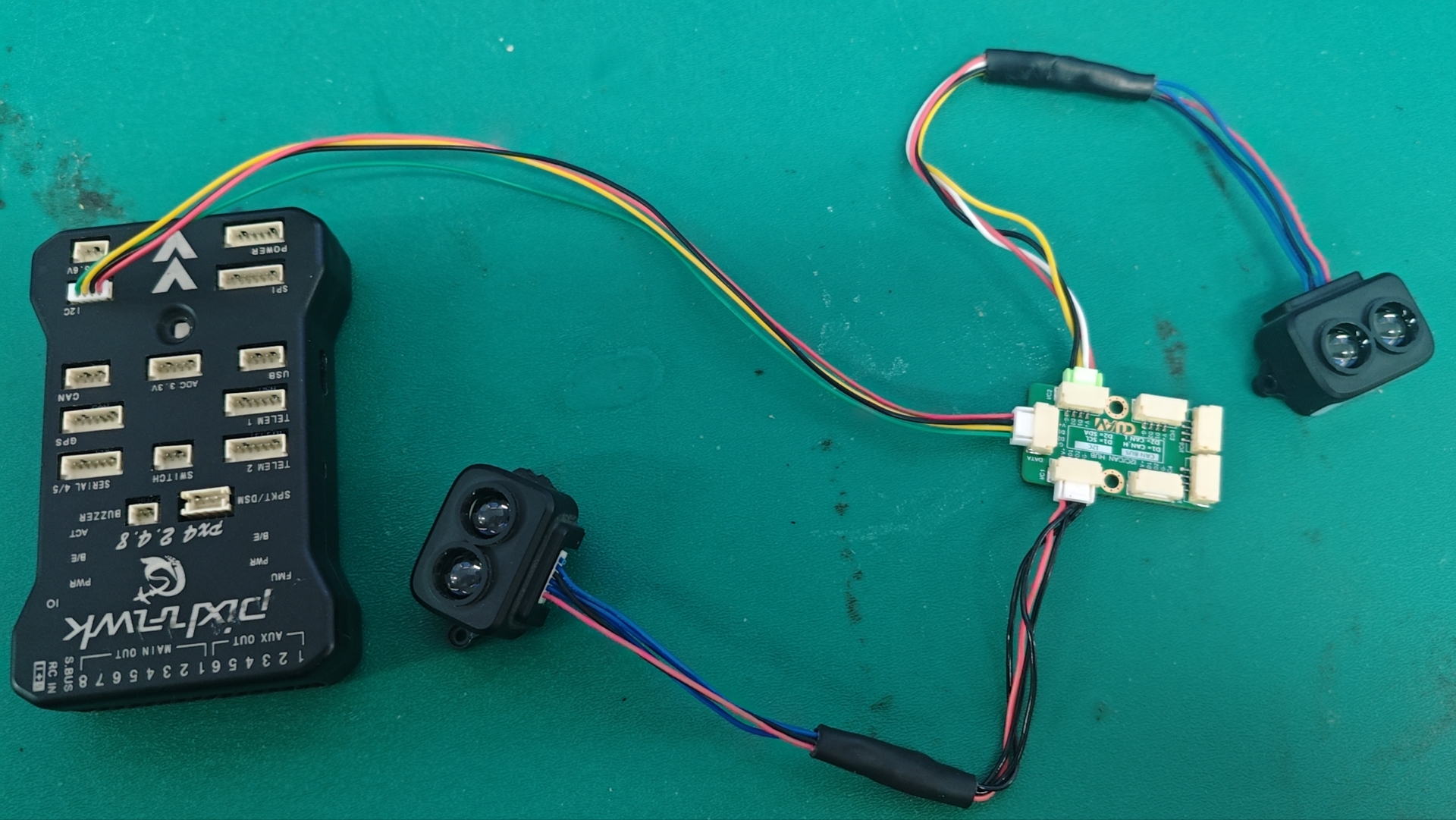
1、连接我们将4P带卡扣转4P不带卡扣线分别连接至扩展板与飞控I2C口。

2、然后将两根4P带卡扣转6P不带卡扣分别连接至扩展板与雷达。
3、全部连接完成后使用Mciro-USB连接飞控与电脑,并打开MissionPlanner开始设置参数。我们在MP上连接上飞控后点击配置/调试->全部参数表,按照下表进行修改参数,修改完成之后点击写入参数并重启飞控。
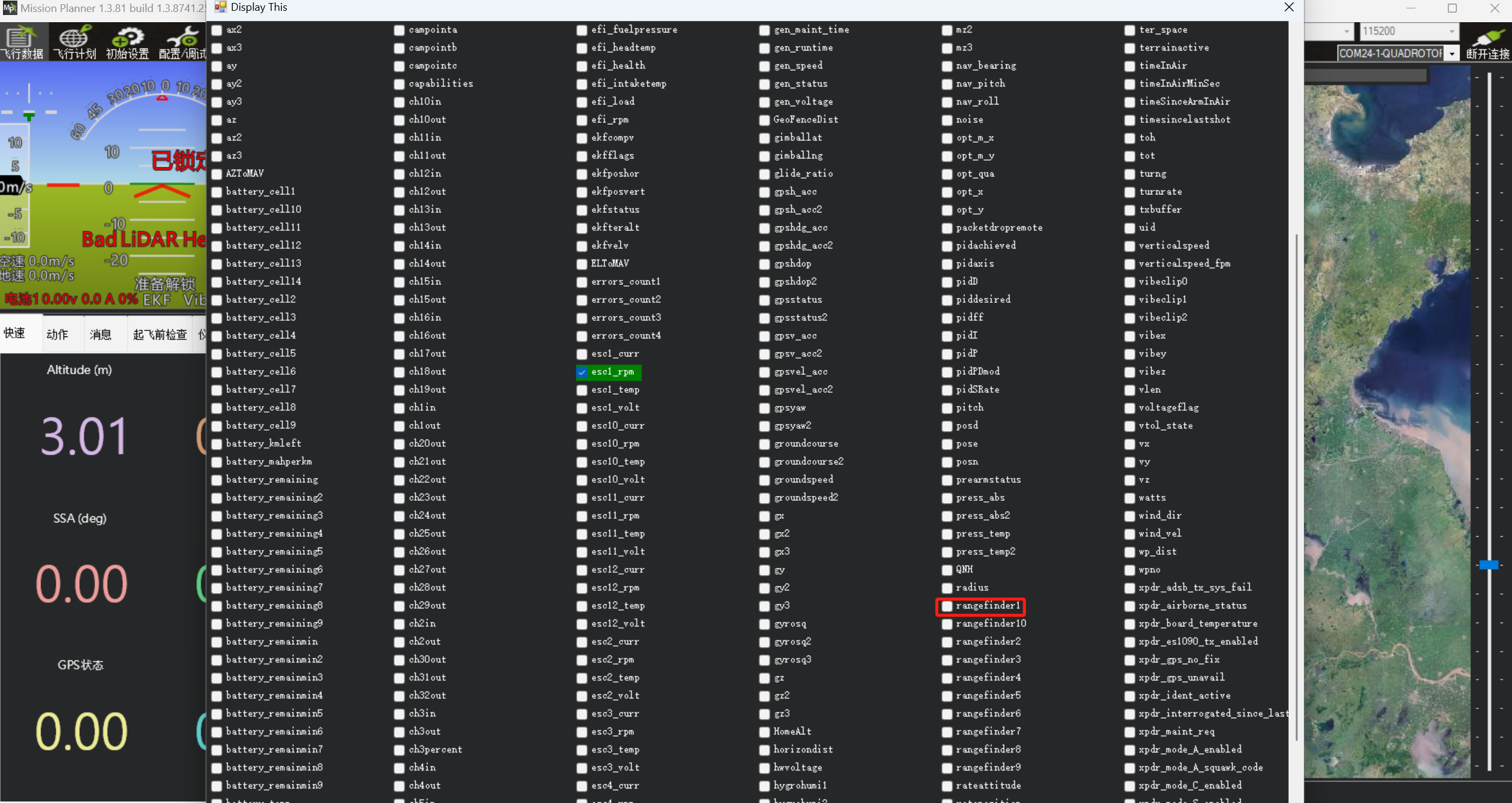
4、重启飞控后我们再次连接,双击右边栏->快速->要被替换的数据显示->选择rangefinder1和rangefinder2。设置完成后我们即可看到雷达的测距数据,我们对其进行遮挡,也能看到数据跟随变化。




至此,已经全部设置完成。
作者的话
如果这篇文章有帮到大家,请大家收藏我的博客!
如果有问题欢迎加入QQ群:667527683交流!
在此感谢大家的观看!