光流链接与设置
产品参数等
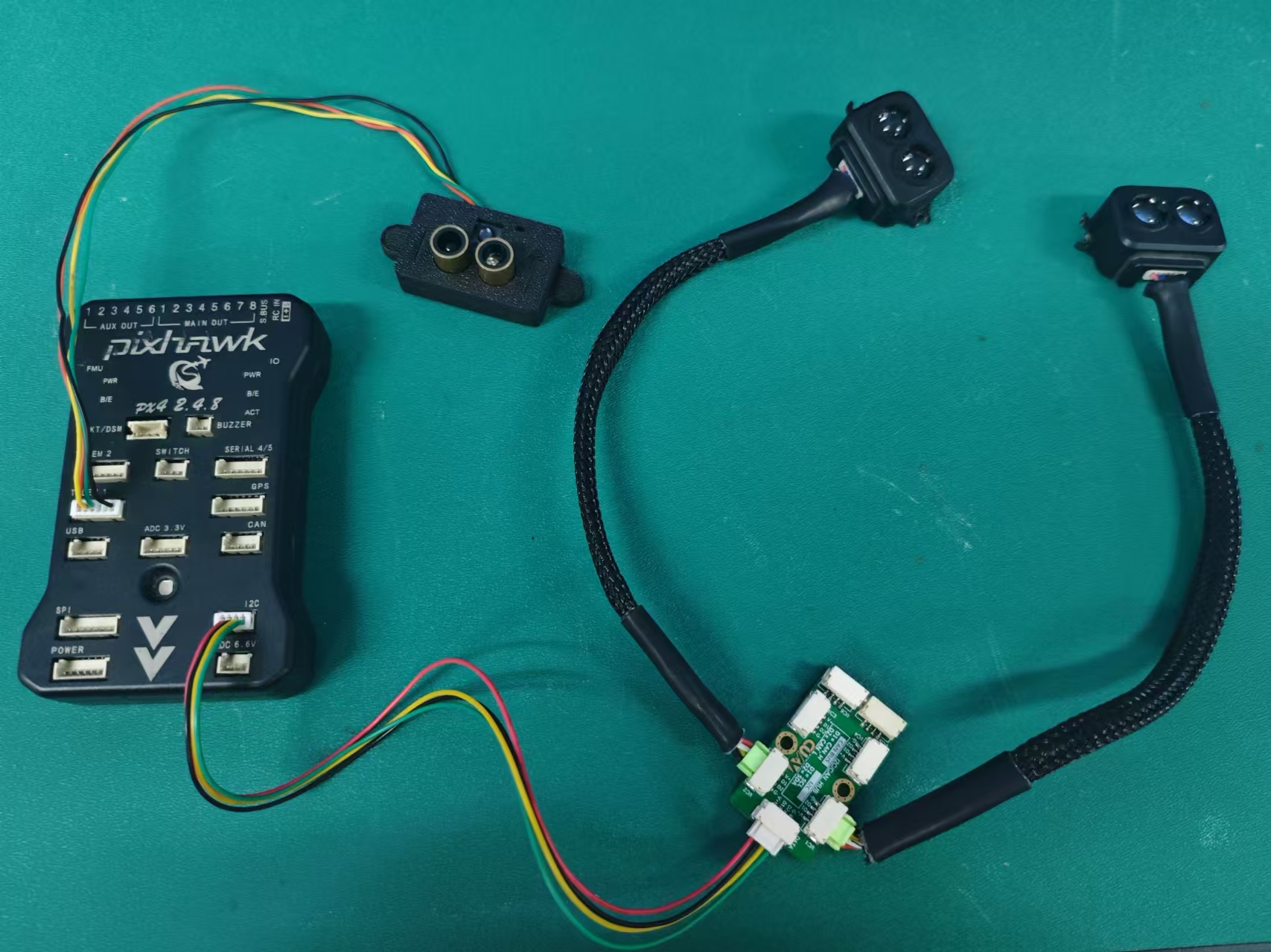
产品参数、接口定义、尺寸、飞控连接等见微空官网产品用户手册:MTF-01光流测距一体传感器-用户手册-微空科技 (micoair.cn)
问题
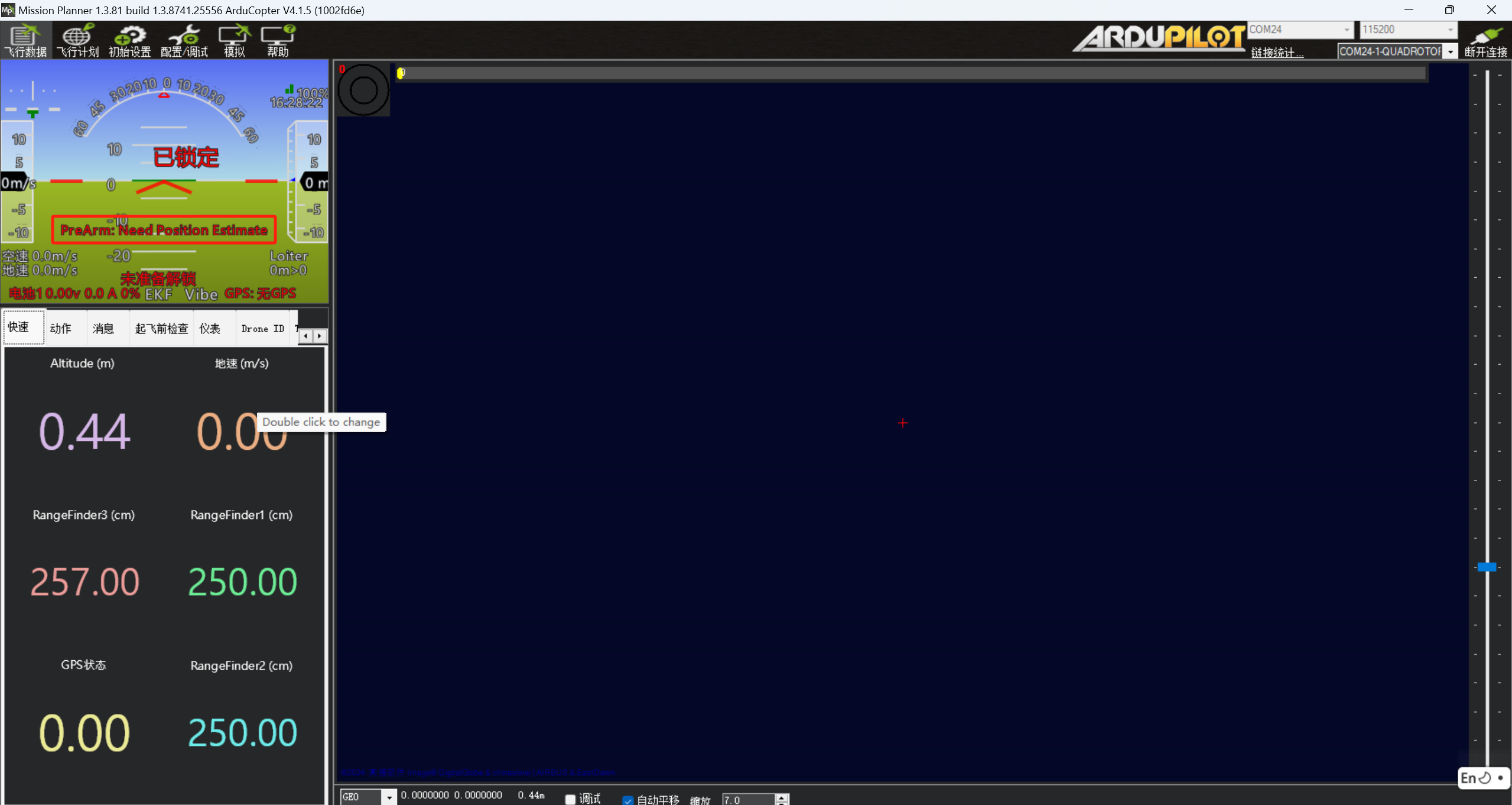
正常链接北醒的两颗TF-Luna雷达和微空的MTF-01光感传感器后出现报错 PreArm: Need Position Estimate,如下图:
解决
此错误在解锁时出现,但检查光感传感器发现有数据,报错需要位置估计,本以为是需要进行定为,将设备带到室外定位后,依然出现这个报错,就是无法解锁。
没有办法,经过请教专业人士研究后,最终发现是发现是设置顺序问题,我们设置的测距仪为领两颗TF-Luna雷达为一号与二号测距仪,光流传感器为三号测距仪,经过专业人士的一番“调校”后,将光流传感器设置为一号测距仪,两颗激光雷达设为二号与三号测距仪即可解决。

具体参数修改表
光流参数
北醒雷达参数见:记一次ArduPilot搭配北醒TF-Luna激光雷达实现激光测距-梦雨技术分享站 (imenyu.cn)
不同的是需要将 北醒雷达配置文章中 的Rngfnd1的参数设置到Rngfnd3中。